Description
■ Description
The ReactorX 150 Robot Arm belongs to a new family of arms from Interbotix featuring the DYNAMIXEL X-Series Smart Servo Motors. The X-Series actuators offer higher torque, more efficient heat dissipation and better durability all at a smaller form factor over previous DYNAMIXEL servos. The DYNAMIXEL XM430-W350-T & DYNAMIXEL XL430-W250-T servos offer high resolution of 4096 positions and user definable PID parameters. Temperature monitoring, positional feedback, as well as voltage levels, load, and compliance settings are user accessible as well. At the heart of the ReactorX 150 is the U2D2 which enables easy access to DYNAMIXEL Wizard software as well as ROS. The ReactorX 150 offers 5 degrees of freedom and a full 360 degree of rotation.
- XM430-W350-T & XL430-W250-T Servos
- Industrial Bearing Base
- Aluminum Construction
- U2D2 for Onboard Processing
- Gripper with Interchangeable Fingers
- 5 DOF
The ReactorX 150 comes fully assembled and tested and is constructed from extremely rigid 20mm x 20mm extruded aluminum aluminum brackets. The arm sits on an industrial grade, slewing bearing for added stability and accuracy. The electronics are covered with a transparent acrylic shield to keep the electronics free from debris as well as with impact from the arm itself.
■ Software Control
| ROS | Serial over USB | DYNAMIXEL SDK | |
| Overview | Packages for Ubuntu 16.04 & ROS Kinetic / Ubuntu 18.04 & ROS Melodic Contains Meshes, URDF, Inertial values, driver node as well as Gazebo config / MoveIt config and examples / demos. | The Interbotix Serial Firmware allows users who wish to use an onboard IK engine to operate a 5DOF arm through the use of serial over USB. | The ROBOTIS Dynamixel SDK is a software development kit that provides Dynamixel control functions using packet communication. |
| Operating System | Linux | Windows / MacOS / Linux | Windows / MacOS / Linux |
| Languages | C++, Python, or any other ROS compatible languages | Any language which can communicate via serial over USB | C, C++, C#, Python, Java, MATLAB, LabVIEW and ROS. |
| Controller | U2D2 | OpenCM9.04-C | U2D2 |
| Demos | Examples include:
|
A Windows Demo is provided allowing for control of any standard X-Series 5DOF arm. Tools are provided for users to become familiar with the Interbotix Serial Protocol | Robotis provides sample code in many languages for users to get started |
| Kinematics Engine | Northwestern Illinois Kinematics Library | Interbotix 5DOF IK Engine | None |
■ Built with Industry Leading Smart Servos
The DYNAMIXEL X-Series smart servos offer features that would normally only be found on industrial level motors for a fraction of the price.
- Addressable – All servos have unique IDs allowing users to easily communicate with individual servos or groups of servos. The Shadow ID feature also allows for easy control of a second servo in dual servo joints.
- Daisy Chain – DYNAMIXEL servos are connected in a daisy chain (each servo plugged into the next in series) making them extremely scalable and easy to maintain.
- Servo Management Software – DYNAMIXEL Wizard 2.0 allows users to configure register settings such as PID gains, Control Modes (position, velocity, current, or PWM) and others. The software also provides tools for firmware updates, diagnostics, configuration and testing, data plotting, generating & monitoring DYNAMIXEL packets, and more.
- Trajectory Smoothing – Smart servos have multiple registers for setting velocity & acceleration limits, PID gains, and more for fine tuning smooth joint motions.
- Low Level Libraries Provided – DYNAMIXEL servos have libraries that abstract away the serial communication layer allowing developers to concentrate their time on higher level code.
■ 3D Print Custom Grippers
The X-Series gripper carriages are designed for users to quickly and easily change the gripper fingers for different projects. CAD files for the gripper are available for download, if you can design and 3D print, the customization is endless. Included with the arm are sticker backed foam and sorbothane rubber both increase gripping strength while relieving stress on the gripper servo.

■ ROS Packages & Support
ROS packages for Kinetic and Melodic on Ubuntu Linux 16.04 and 18.04 make it easy to get started with the ReactorX 150 arm. Packages include full meshes and URDFs (including accurate inertial models for the links), driver node that controls the physical robot arm and publishes joint states as well as gazebo and moveIt support. Examples are also included to show users how the core packages work.
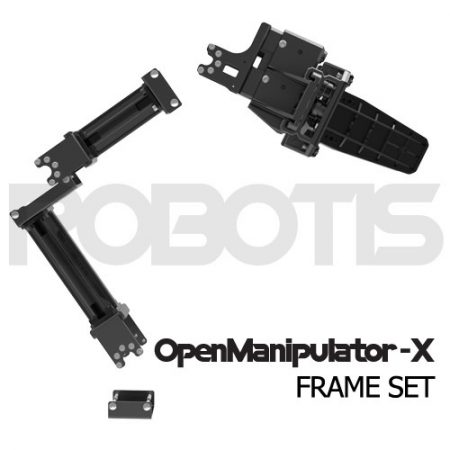
■ Aluminum Construction
All of the X-Series arms are constructed using extremely ridged, lightweight T-slot extruded aluminum and aluminum brackets. All of the X-Series Arms come with a 90 degree elbow design allowing for a greater range of movement and the ability to fold completely on itself.
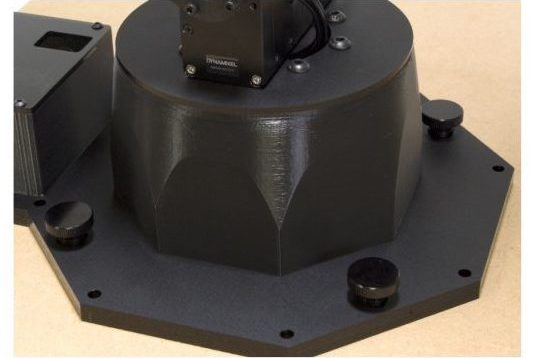
■ Industrial Grade Bearing
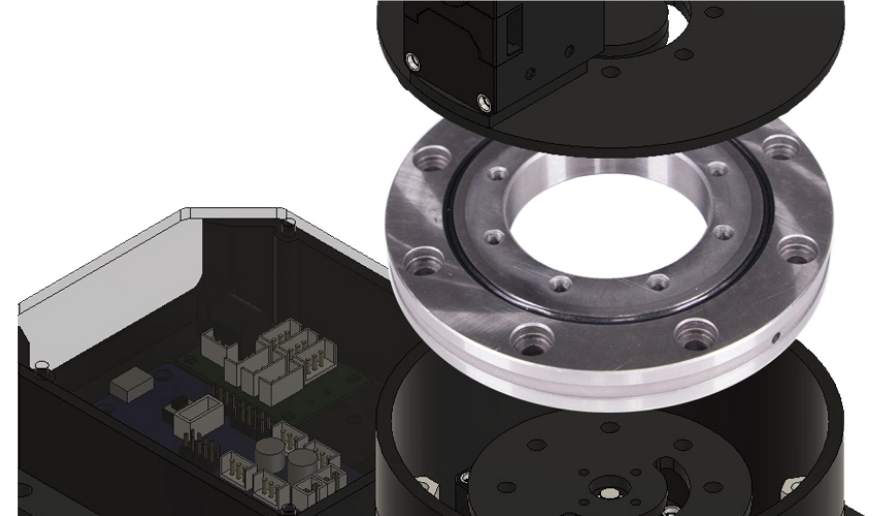
Each of the X-Series arms* features an industrial quality, high grade slewing bearing base as the central mounting point. The bearing ensures maximum rigidity and accuracy and takes all strain of the base servo increasing the longevity of the arms.
(* PincherX 100 comes with roller bearing base)
■ ReactorX 150 Reach & Span
X430 DYNAMIXEL servos support up to 360 degrees of rotation, which results in an extraordinary range of motion.
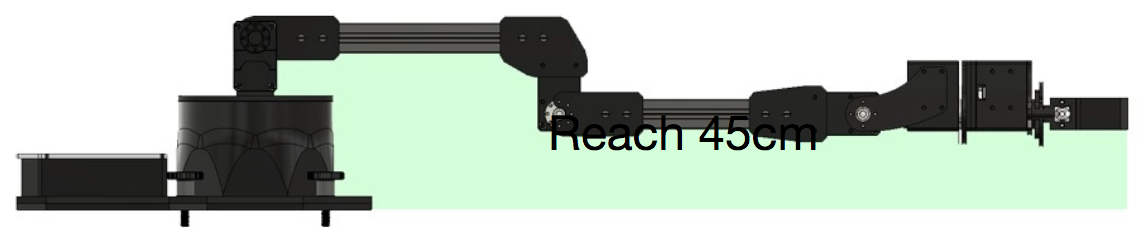
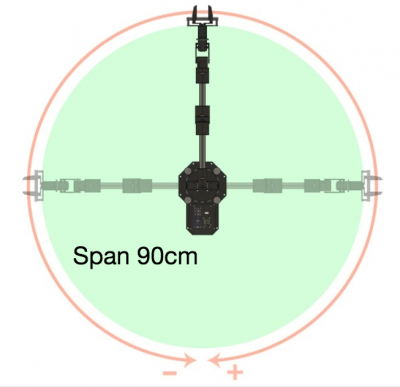
The ReactorX 150 Robot Arm has a 45cm horizontal reach from center of the base to gripper with a total span of 90cm. The working payload for the ReactorX 150 arm is 100g. Working payload is the weight in which the arm should not exceed under normal working circumstances and is measured by the arm’s ability to repeatedly lift an object at roughly half extension without failure. While the ReactorX 150 can lift more than 100g, we do not recommend payloads over this number.
■ Mounting Hardware
 The base comes with mounting thumb screws to secure the arm easily to most any surface, wood screws are also an option for a more permanent mounting solution.
The base comes with mounting thumb screws to secure the arm easily to most any surface, wood screws are also an option for a more permanent mounting solution.
■ Package Contents
|
Description |
Quantity |
|
XM430-W350-T Actuators |
2 |
|
XL430-W250-T Actuators |
4 |
|
1 |
|
|
12v5a Power Supply |
1 |
|
USB2 Micro Cable |
1 |
|
ReactorX 150 Hardware & Frames |
|
|
Extra Gripper Foam / Rubber |
|
|
Drivers / Extra Hardware |
|
|
Base Mount Hardware |
|