
Description
■ XH540-V150-R
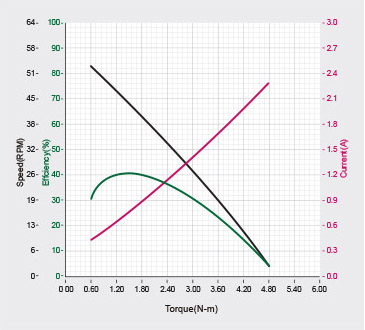
- Stall Torque: 6.4 N.m
- No Load Speed: 60 rpm
- Input Voltage: 24V
- Gear Ratio: 152.3 : 1
- Physical Connection: RS-485
- Coreless Maxon motor
■ Basic Features
The DYNAMIXEL is a robot exclusive smart actuator with fully integrated DC Motor + Reduction Gearhead + Controller + Driver + Network in one DC servo module. The DYNAMIXEL XH / XM-Series offers a variety of control techniques based on high-performance current sensing algorithms. It adopts the aluminum case and adopts the new technology such as the hollow cable fastening structure for users’ convenience.
- 6 Operating Modes
Torque control, Velocity control, Position control, Extended position control, Current based position control, PWM control
- Profile control for smooth motion planning
- Improved heat sink featuring an aluminum case
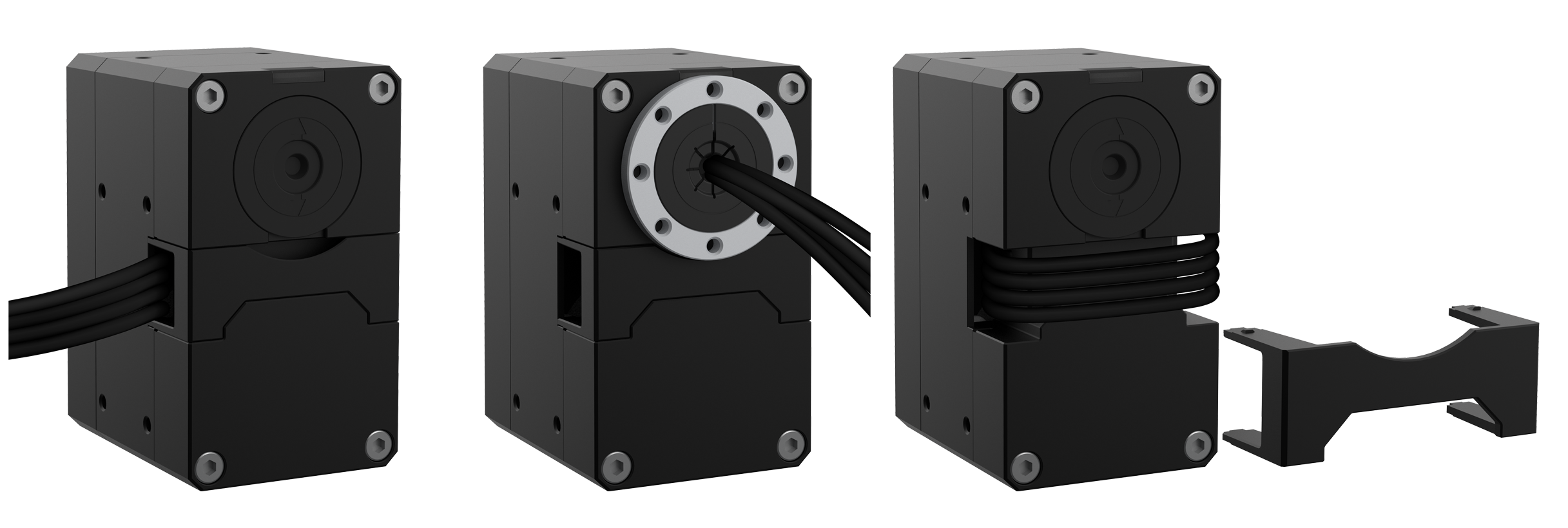
- Hollow back case minimizes cable stress (3-way-routing)
- Direct screw assembly to the case (without nut insert)
- Energy saving (reduced current from 100mA to 40mA)
- 28.4% reduced volume compared to the MX-106
- Support synchronous control mode
- Support external I/O port support
■ Package Contents
|
Description |
Quantity | |
| DYNAMIXEL | XH540-V150-R | 1 |
| HORN | HN13-N101 | 1 |
| WASHER | Teflon Washer (for Horn Assembly) | 1 |
| CABLE | Robot Cable-X4P 180mm | 1 |
| Robot Cable-X4P (Convertible) 180mm | 1 | |
| BOLT/NUT | Wrench Bolt (WB M2.5*5) | 16 |
| Wrench Bolt (WB M2.5*4) | 10 | |
| Wrench Bolt (WB M3*8) | 1 | |
| ETC | Spacer Ring | 8 |
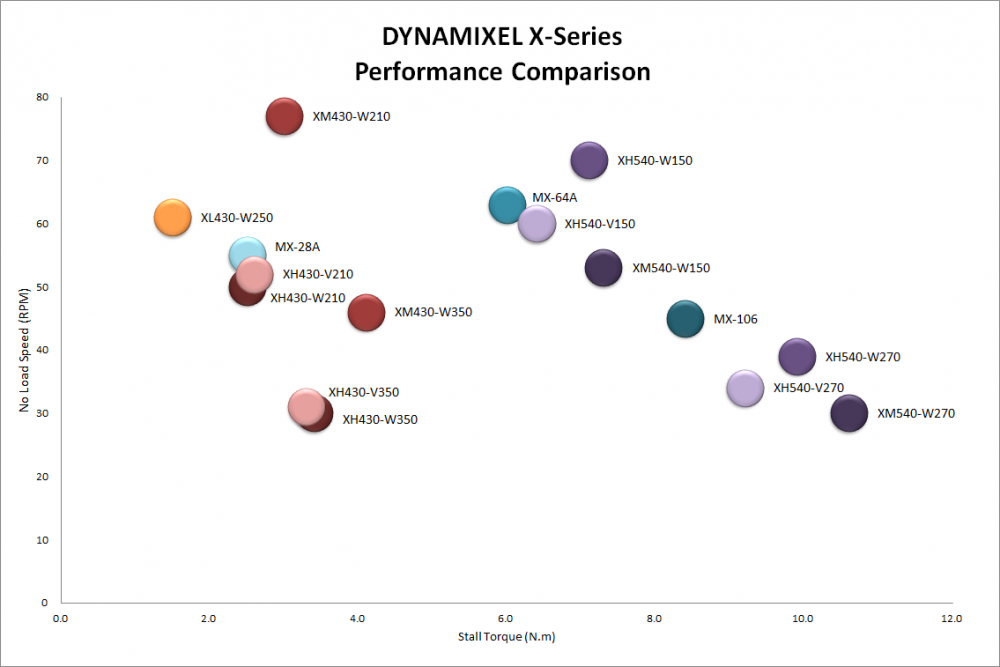
■ Performance Comparison
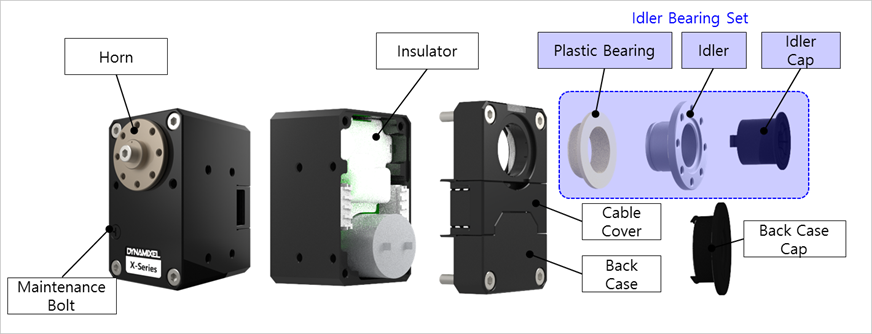
■ Key Names
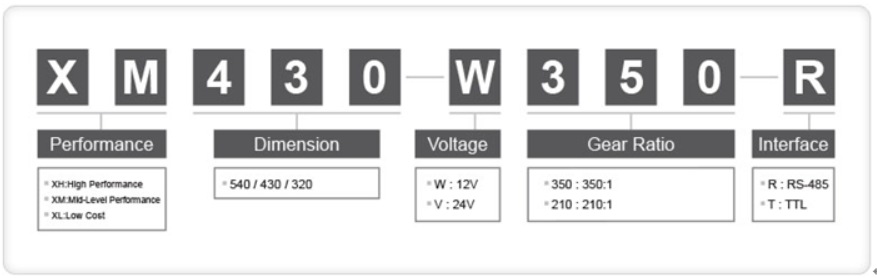
■ Model Numbering
■ How to Use
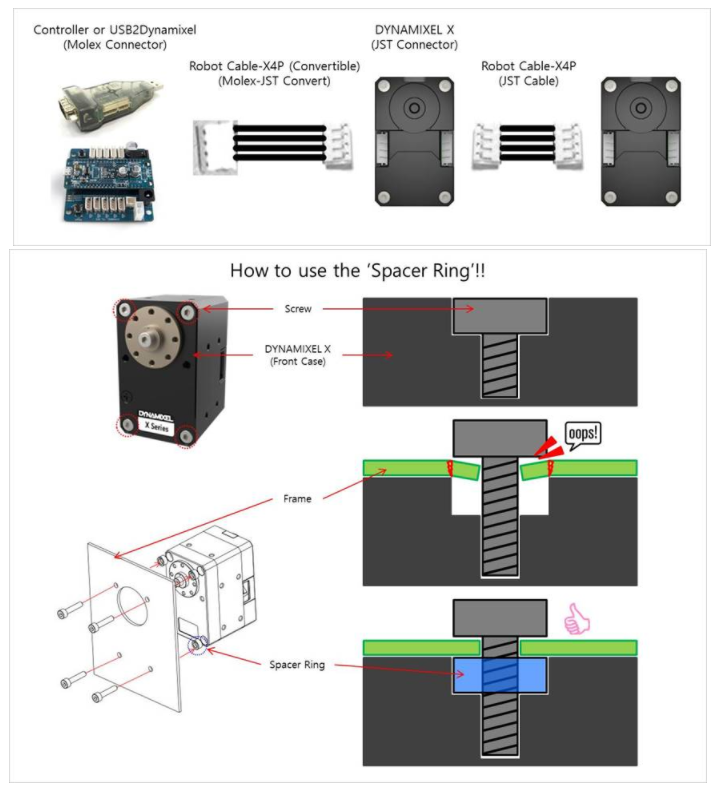
■ Various Cabling Methods
■ Please note:
The DYNAMIXEL X-Series adopted a new gold-plated JST connector for secure and reliable communication.
For more information, please see the [DYNAMIXEL Connector Standard] page on ROBOTIS’ e-Manual.
To control DYNAMIXEL X-Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.
However, the Molex-JST convertible cable is NOT included in the XL430 model. Please purchase a convertible cable when using a controller and interface that supports the JST connector.
|
Controller / Interface Board |
Cable |
Dynamixel X |
||
|
Model |
Supports Connectors : |
Supports Connectors : |
Communication |
|
|
OpenCM+485 Expansion Board |
Molex (3P, 4P) |
Robot Cable-X3P 180mm (Convertible) |
JST-3P |
TTL |
|
USB2Dynamixel |
||||
|
OpenCR1.0 |
JST (3P, 4P) |
Robot Cable -X3P (by length) |
||
|
U2D2 |
||||
|
OpenCM+485 Expansion Board |
Molex (3P, 4P) |
Robot Cable -X3P 180mm (Convertible) |
JST-4P |
RS-485 |
|
USB2Dynamixel |
||||
|
OpenCR1.0 |
JST (3P, 4P) |
Robot Cable -X3P (by length) |
||
|
U2D2 |
||||






{kind=link}