
Description

■ Basic Features
- 6 Operating Modes:
Torque control, Velocity control, Position control, Extended position control, Current based position control, PWM control - Improved Torque, Compact Design
- Enhanced Durability and Expandability
- Hollow Back Case Minimizes Cable Stress (3-Way Wiring)
- Frames Directly Screwed onto the Case (No Nuts Needed)
- Improved Aluminum Case Heat Sink
- Profile Control for Smooth Motion Planning
- Trajectory Data and Moving Status (In-Position, Following Error, etc.)
- Energy Efficient (Standby Current Reduced from 100mA to 40mA)
- 31.8% reduced volume compared to the MX-28
■ Package Contents
|
Description |
Quantity | |
| DYNAMIXEL | XM430-W210-R | 1 |
| HORN | HN12-N101 | 1 |
| WASHER | Teflon Washer (for Horn Assembly) | 1 |
| CABLE | Robot Cable-X4P 180mm | 1 |
| Robot Cable-X4P
(Convertible) 180mm |
1 | |
| BOLT/NUT | Wrench Bolt (WB M2.5*4) | 16 |
| Wrench Bolt (WB M2.5*6) | 1 | |
| Wrench Bolt (WB M2*3) | 10 | |
| ETC | Spacer Ring | 8 |
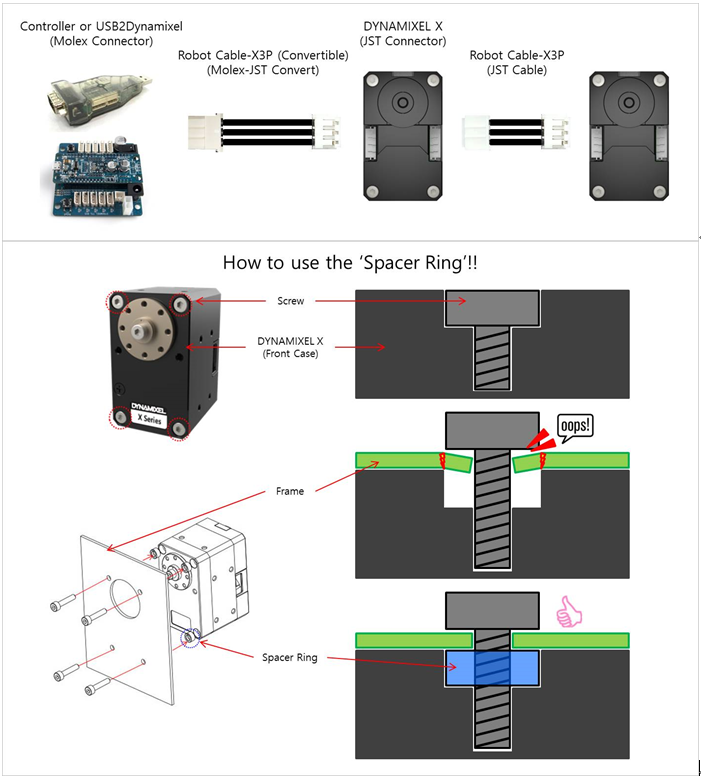
■ Various Cabling Methods

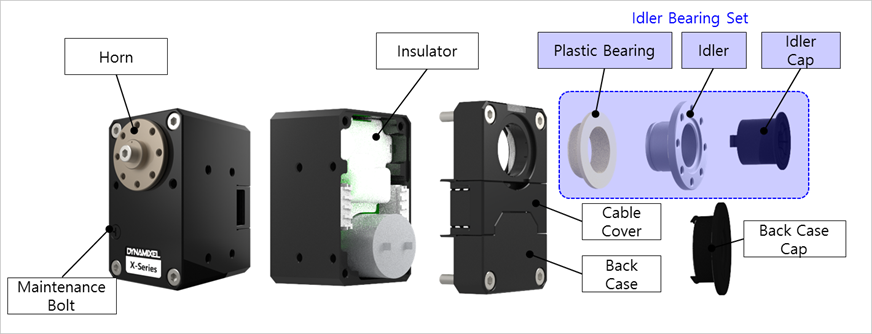
■ Key Names
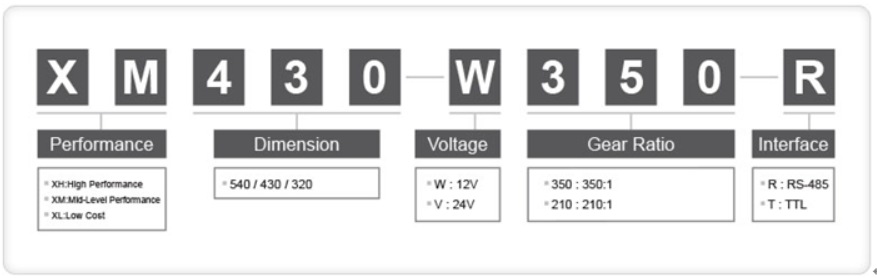
■ Model Numbering
■ How to Use
The DYNAMIXEL X-Series adopted a new gold-plated JST connector for secure and reliable communication. For more information, please see the [DYNAMIXEL Connector Standard] page on the e-Manual.
To control DYNAMIXEL X-Series actuators via OpenCM or USB2Dynamixel, please use the JST-Molex Convertible Cable enclosed in the package.







{kind=link}