Description
■ Description
The ROS-enabled OpenManipulator is a full open robot platform consisting of OpenSoftware, OpenHardware and OpenCR (Embedded board)

■ Features
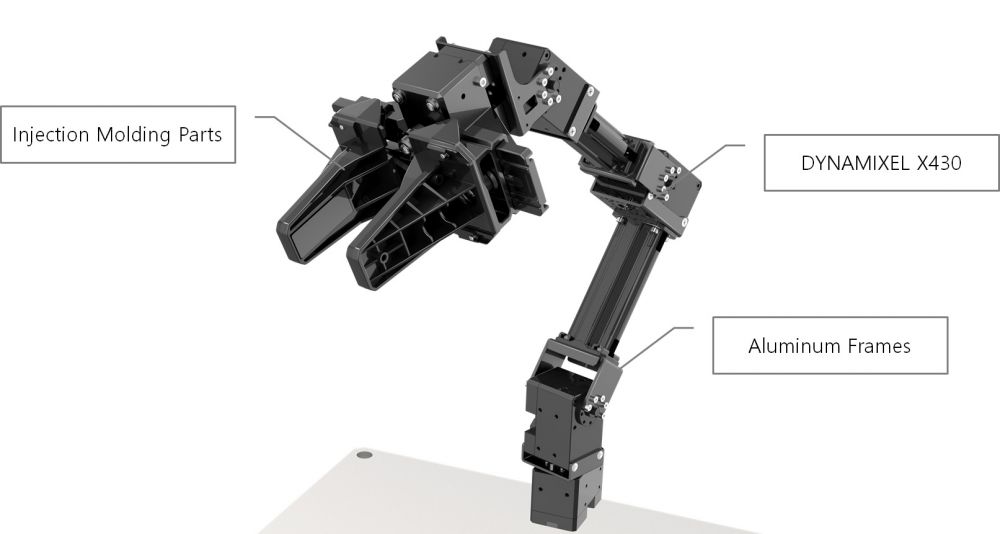
- Has a high payload as the DYNAMIXEL XM430-W350-T model is applied.
- Easy to use with PC or mobile platform such as TB3 Waffle Pi.
- Provides source code and development environment which allows you to immediately operate with the TB3 Waffle Pi.
(compatible with the controller and the power supply of the TB3 Waffle Pi) - You can freely select and use either PC or OpenCR to control the OpenManipulator.
- Provides a variety of open source software as well as 3D drawings and CAD data for research and development.
■ Various Applications
– mounted on Base Plate or TB3 Waffle Pi

■ Optional Parts (sold separately)
| Power Supply | SMPS 12V 5A |
| Controller | OpenCR or PC |
| Interface | U2D2 |
| Frame | Pi-Camera Frame Set |
| Base | Base Plate-02 |
■ Please Note:
- The assembly manual is not included in the package and is only available to download online.
- The idler set, HN11-I101 Set, is included in case you would like to use DYNAMIXEL XL430 as a hinge. (Need to purchase DYNAMIXEL XL430 separately)
■ Parts List
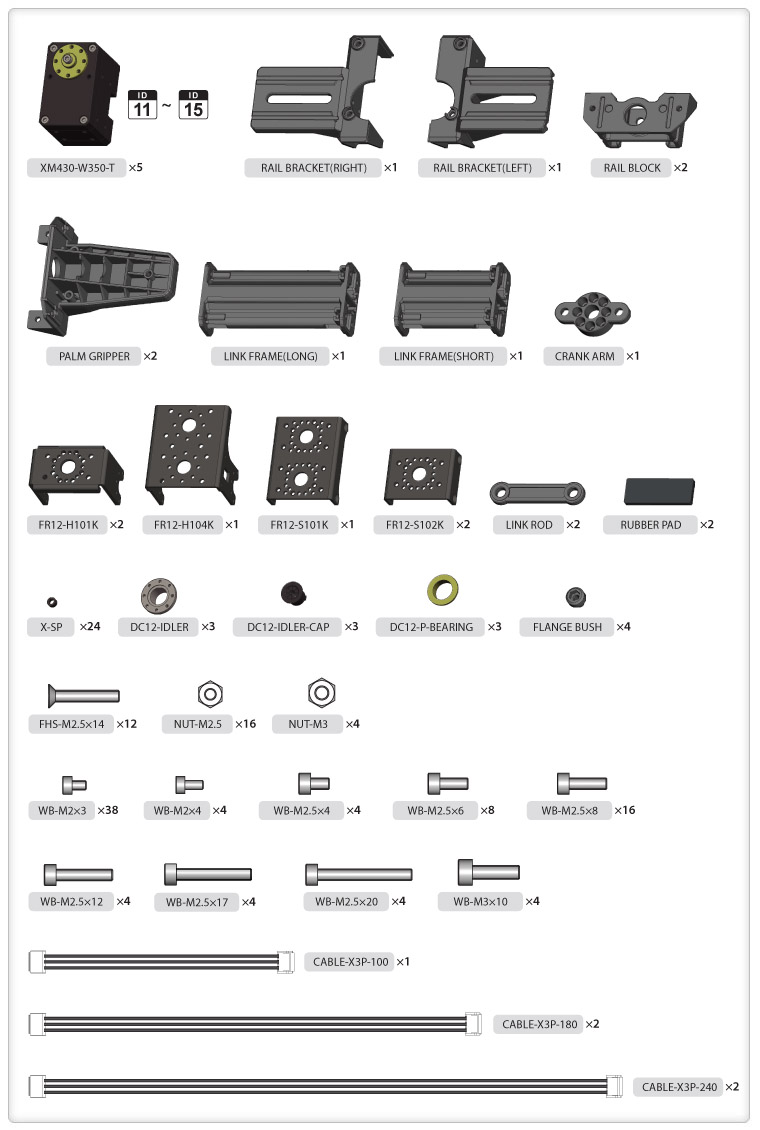
| XM430-W350-T | 5 |
| Exclusive Plastic Frame Set | 1 |
| FR12-H101K | 2 |
| FR12-H104K | 1 |
| FR12-S101K | 1 |
| FR12-S102K | 2 |
| HN12-I101 Set | 3 |
| HN11-I101 Set (spare) | 3 |
| Robot Cable Set X3P (by length) | 5 |
| Bolt & Nut Set | 1 |
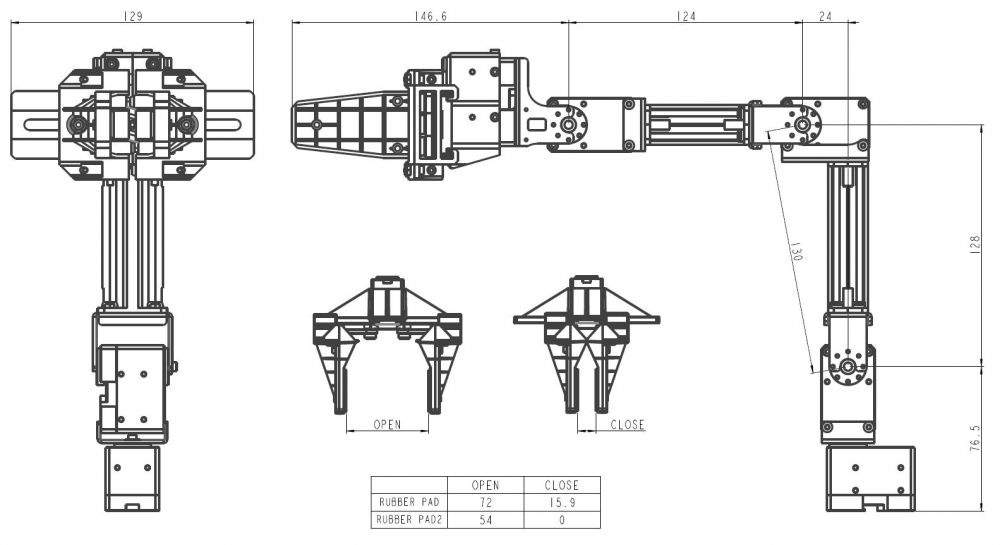
| Rubber Pad (Finger Tip) | 2 types x 2 |
| Phillips Screwdriver | 1 |
| Allen Wrench (by type) | 3 |