Description
■ Description
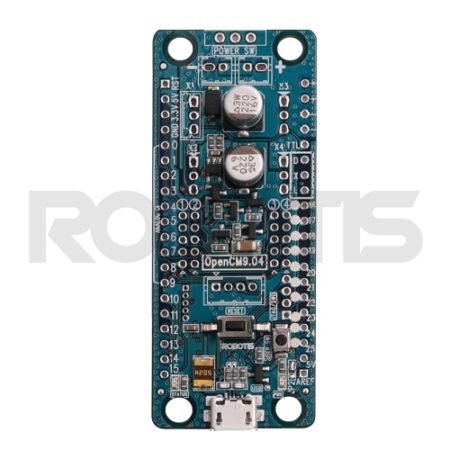
- OpenCM9.04 is an open-source controller that runs on a 32bit ARM Cortex-M3.
- The 3-Pin connector is used to control ROBOTIS’ XL320 Dynamixels with TTL communication.
- Uses a USB Cable (Mircro-B) (included), to download programs onto the board.
- The board is easily programmable with [ROBOTIS OpenCM], an Arduino-like IDE that allows the user to program in C/C++.
- JTAG / SWD terminal can be used run commercial developmental programs.
■ Please note:
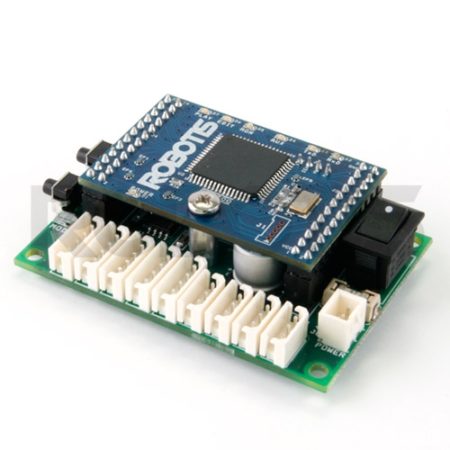
- The OpenCM 485 Expansion Board, which supports TTL and RS-485, can be used to control all types of DYNAMIXEL’s, such as AX, MX, X and Pro series.
- When using the OpenCM9.04-C to control the DYNAMIXEL, a separate power supply must be supplied to the DYNAMIXEL.
- RoboPlus can be used when the board is connected to the PC via USB Downloader LN-101 or BT-210.
- PC must have Bluetooth device for Bluetooth connection.
- ROBOITS OpenCM IDE can be used only via Micro 5PIN USB Cable.
- The RoboPlus and ROBOTIS OpenCM IDE CANNOT be used simultaneously.
- The firmware must be changed depending on the software to be used. (Please refer to the e-Manual for changing the firmware.)
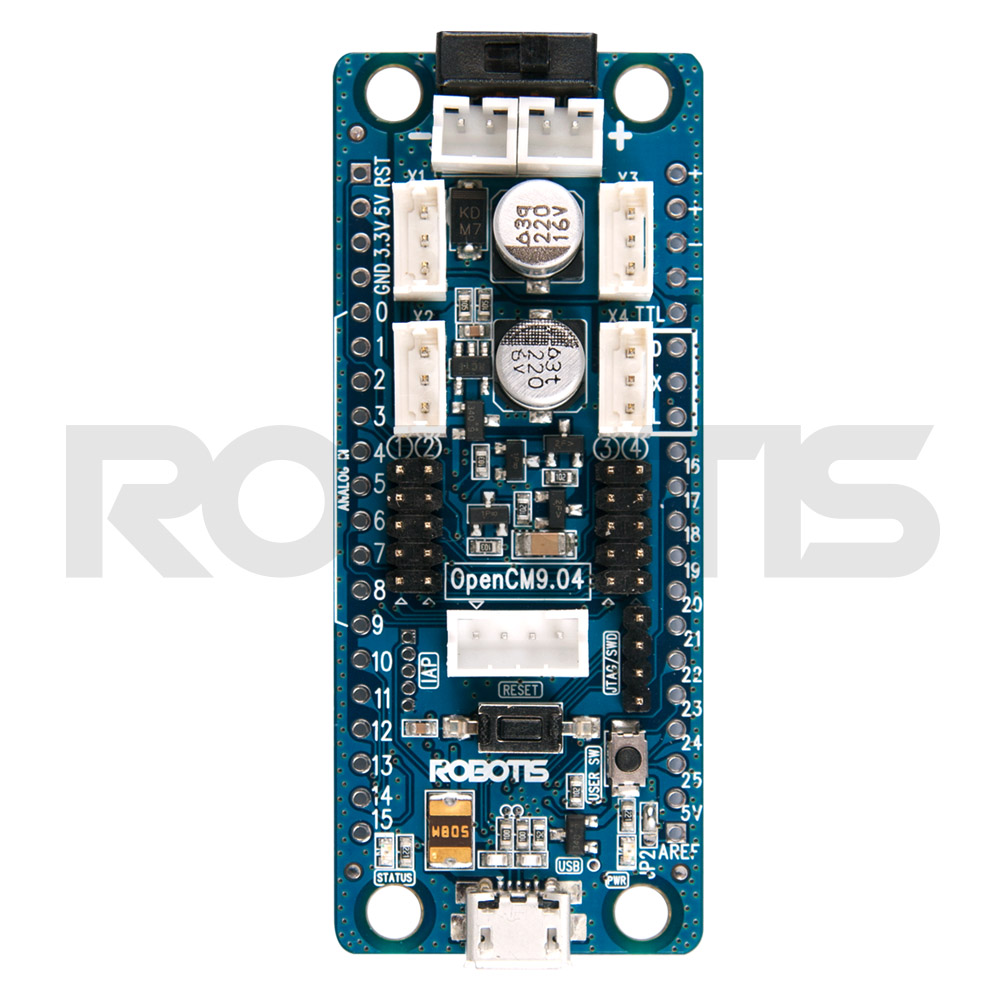
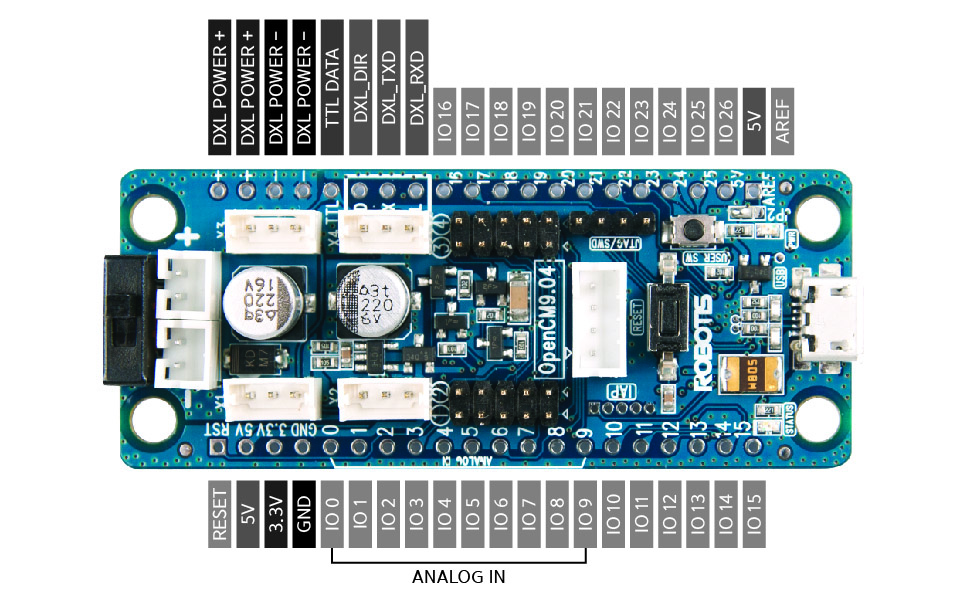
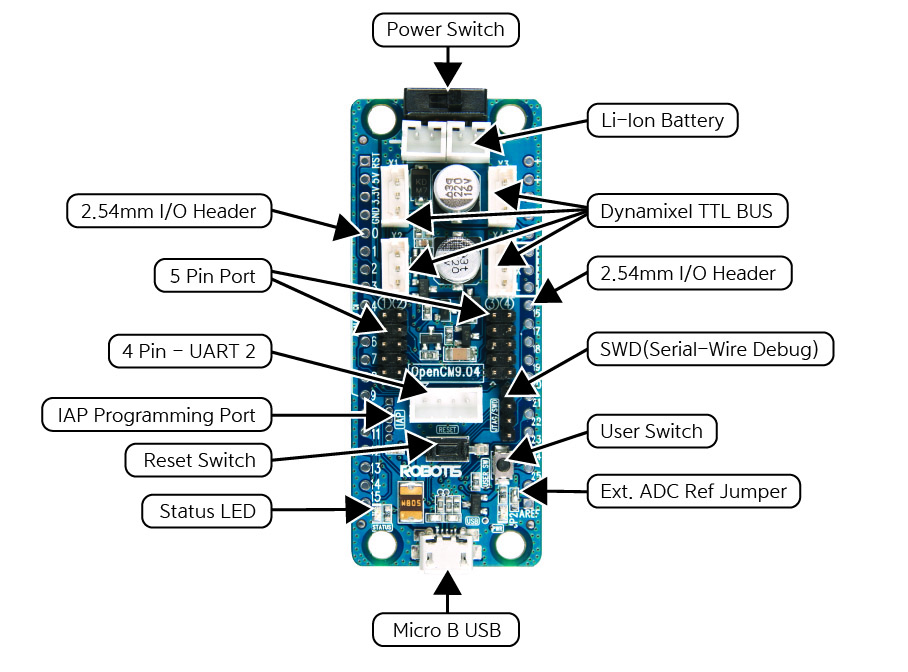
■ Diagram
■ Package Contents
|
Description |
Quantity |
|
|
Controller |
OpenCM9.04_C |
1 |
|
Socket |
1×20 PIN Header Socket |
2 |
|
Socket |
1×20 BOX Header Socket |
2 |
|
Cable |
USB Downloader Cable (Micro-B) |
1 |
|
Manual |
Instruction Manual |
1 |