Description
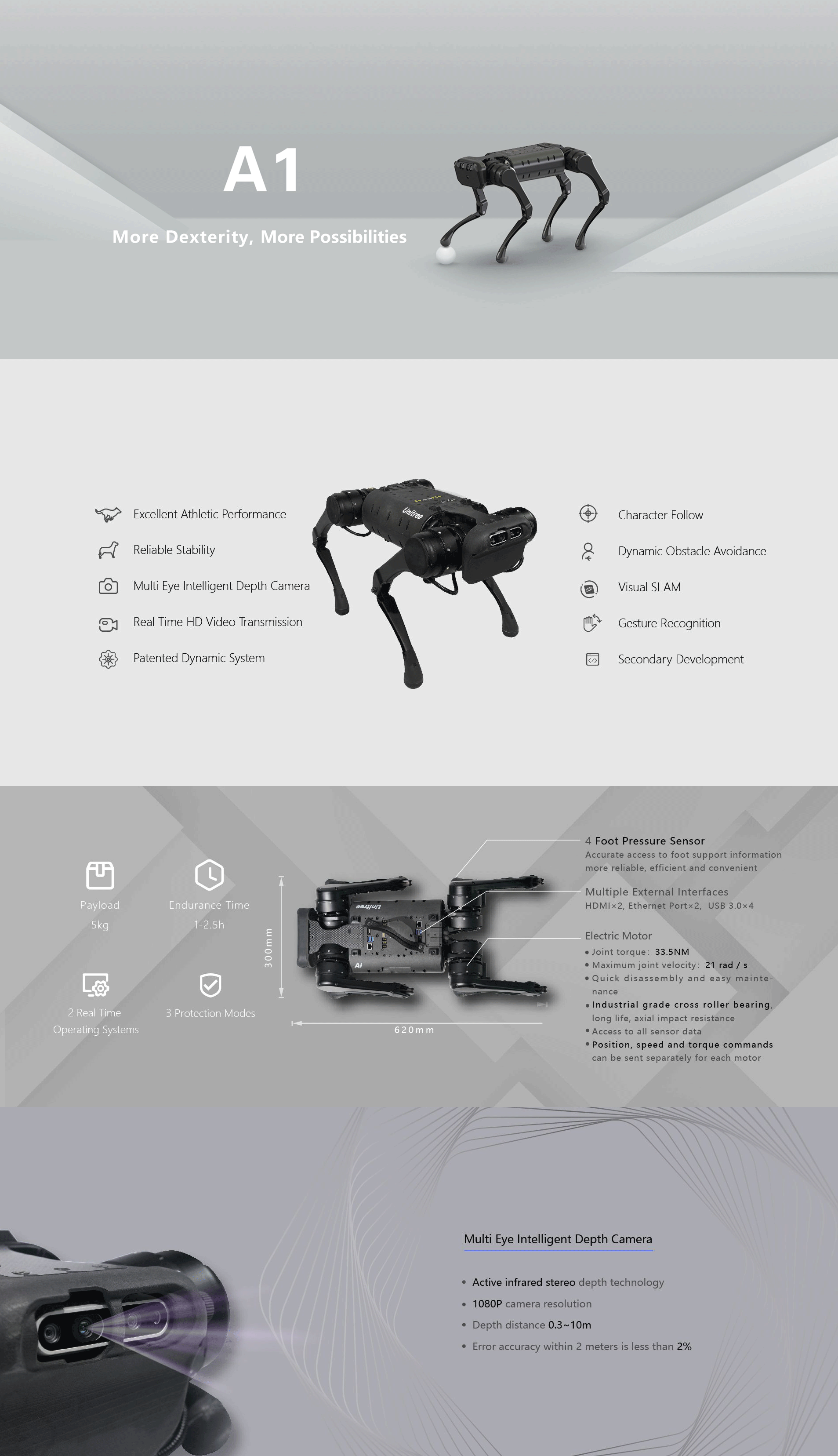
■ Meet Unitree’s A1 Quadruped Robot!
■ Higher Running Speed

- Maximum continuous outdoor running speed at 3.3m/s (11.88km/h).
- The fastest and most stable small and medium sized quadruped robot on the market.
(World Record: 3.7m/s on a treadmill by MIT) - With the potential to be a great jogging companion.
■ Excellent Motion Stability
Advanced dynamic balancing algorithm enables A1 to quickly reach balance in different situations like impact or fall.
■ Patented Power System
- The ultimate power system brings excellent performance, which is perfect of all kinds of robot competitions.
- Crucial for high-speed running.
| Function / Specification | A1 Motor | Comparable Competitors |
|---|---|---|
| Maximun torque | 33.5 N·m | about 18 N·m |
| Weight | 605g | 480 ~ 550g |
| Joint Angular Acceleration Feedback | Equipped | No |
| Torque / Weight Ratio | 55.37 N·m/kg | 37.5 ~ 32.73 N·m/kg |
| Encoder Resolution | 15bit | 14bit |
| Output Bearing Reliability | Large size reliable industrial cross roller bearings. | Conventional thin wall bearings, which are fragile after falling or under axial impacts. |
■ Patented Body Structure & Layout
- High strength and light body structure. Easy to maintain. 24V external power input. 5V, 12V, 19V power supply. Convenient for additional external equipments.
- Equipped with high-performance dual master control (sensing master control and motion master control).
- External interface: 4USB, 2HDMI, 2*Ethernet
- Master control can be upgraded to TX2.
- Standard equipments include RealSense depth cameras.
- Capable of map building and obstacle avoidance.
■ Patented Sensitive Foot Contact

- Integrated force sensor at each foot end. Convenient for robot to obtain realtime contact states of feet under any situations.
- More accurate and sensitive than those systems that estimate feet contacts using motor currents.
- Integrate foot contact sensor with estimated motor current foot sensor, providing more sensitivity and reliability
- Foot end is waterproof and dust-proof, and easy to replace after wear and tear.
■ Vision-based Autonomous Object Tracking

- Realtime tracking of objects within visual range.
- Support online machine learning of the target features.
- Displaying the confidence of tracking using color box (green → red, 100% → 0%)
■ Vision-based Autonomous Obstacle Avoidance

- Avoid obstacle within 0.8m of the robot’s visual range
- Capable of detecting the obstacle shapes to adjust the body position
- Realtime display of the adjustment of robot body, maximum distance and area within the visual angle, and the range of walking track.
■ Choose to Assemble High Precision Lidar
- Support map building
- Autonomous positioning
- Navigation planning
- Dynamic obstacle avoidance
■ User Friendly Interface

- The user PC can directly connect the robot’s built-in dual main control and bottom controller with Ethernet
- Convenient for real-time data transmission such as visual perception
- Access to lower-level control. It can read and control all motors and sensors of the robot in real time. Easy to use open source robot algorithm directly
- Access to high-level control. It can directly send high-level movement commands such as forward, backward, left and right movements to the robot
■ Outstanding Software & Hardware Reliability

- More than 6 years in the field of quadruped robot
- One A1 robot performed backflip 80 times during CES 2020
- Used closed-loop backflip algorithm to ensure motion stability
■ A1 Package