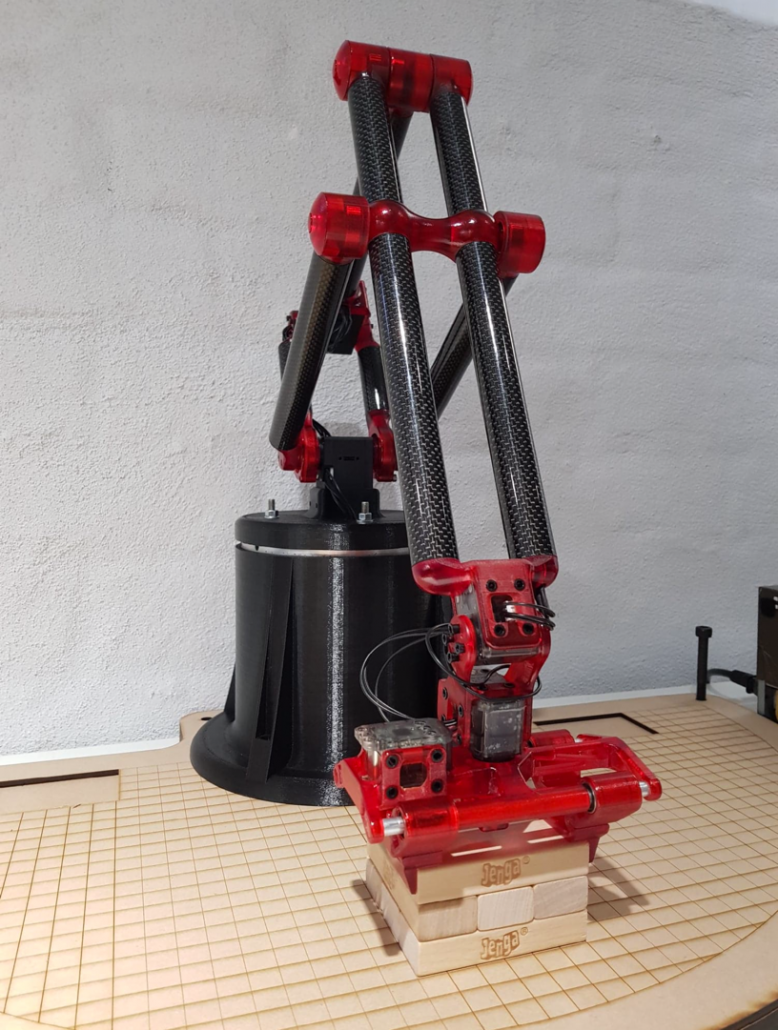
A group of students at the Uni of Melbourne designed, built and programmed this robot arm to build a Jenga Tower using Dynamixels as part of the Robotics Systems course (MCEN90028) – it’s a fantastic design. The goal of this project was to design, build and program a robotic manipulator to automate the stacking of a Jenga tower.