


Description
■ Description
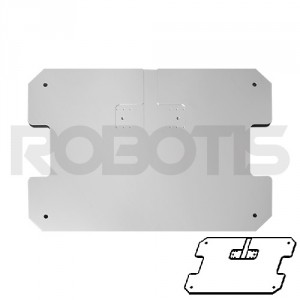
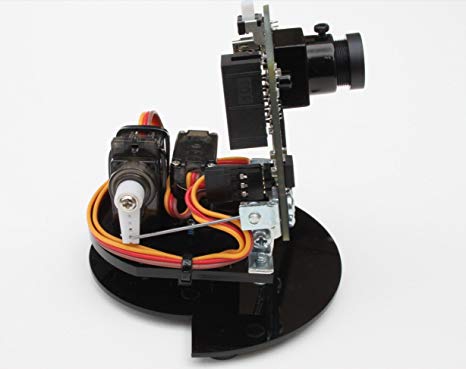
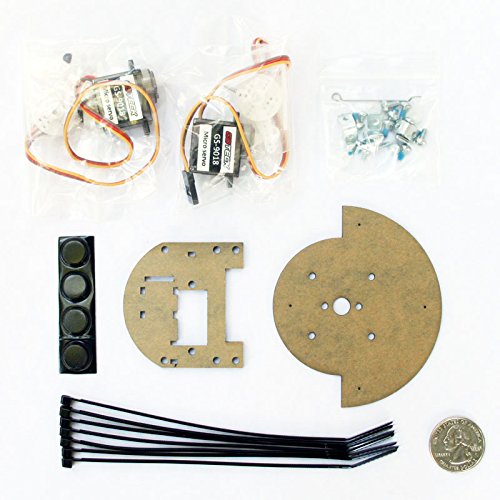
This is a package set of PixyCam and PixyCam Pan/Tilt. It includes the PixyCam image sensor, two laser-cut acrylic pieces for the base, two servos for the pan and tilt axes, and all the mounting hardware and cable ties you need to assemble. Assembly instructions are located on the wiki.
- Small, fast, easy-to-use, low-cost, readily-available vision system
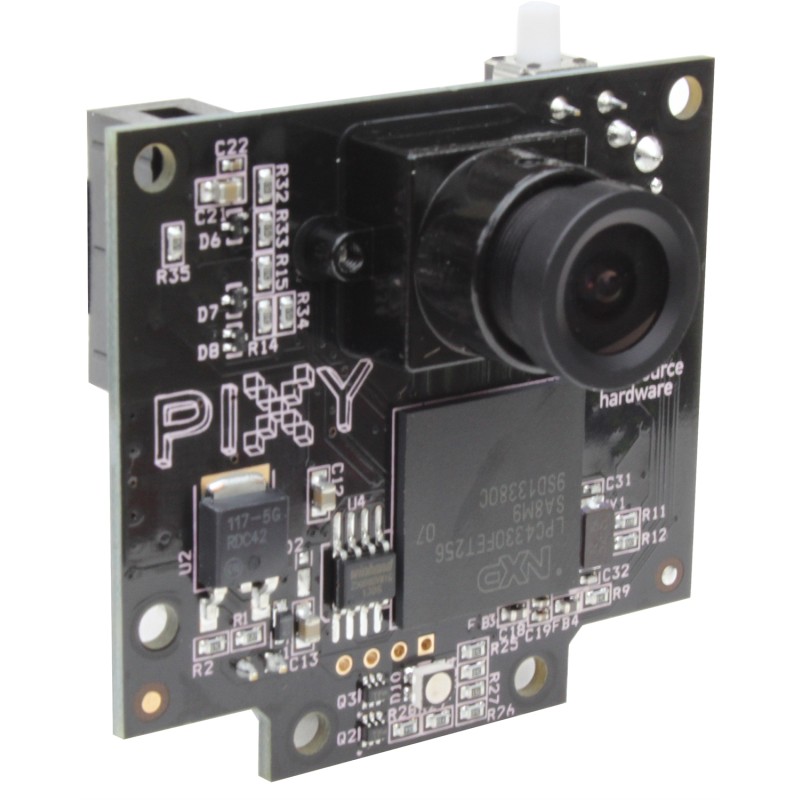
- Processor: NXP LPC4330, 204 MHz, dual core
- Image sensor: Omnivision OV9715, 1/4″, 1280×800
- Lens field-of-view: 75° horizontal, 47° vertical
- Entirely open-source (hardware, firmware and software)
■ 50 frames per second
Pixy processes an entire 640×400 image frame every 1/50th of a second (20 milliseconds). This means that you get a complete update of all detected objects’ positions every 20ms. At this rate, tracking the path of falling/bouncing ball is possible. (A ball traveling at 30 mph moves less than a foot in 20ms).
■ Color-based filtering
Pixy uses a color-based filtering algorithm to detect objects. Most of us are familiar with RGB (red, green, and blue) to represent colors. Pixy calculates the color (hue) and saturation of each RGB pixel from the image sensor and uses these as the primary filtering parameters. Pixy remembers up to 7 different color signatures, which means that if you have 7 different objects with unique colors, Pixy’s color filtering algorithm will have no problem identifying them. If you need more than seven, you can use color codes.
![]()
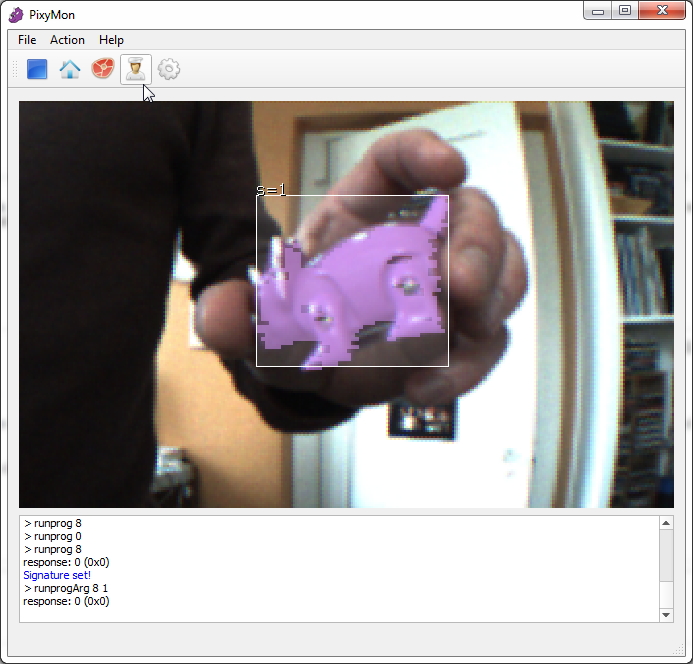
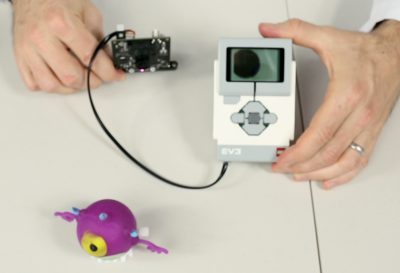
■ PixyMon lets you see what Pixy sees
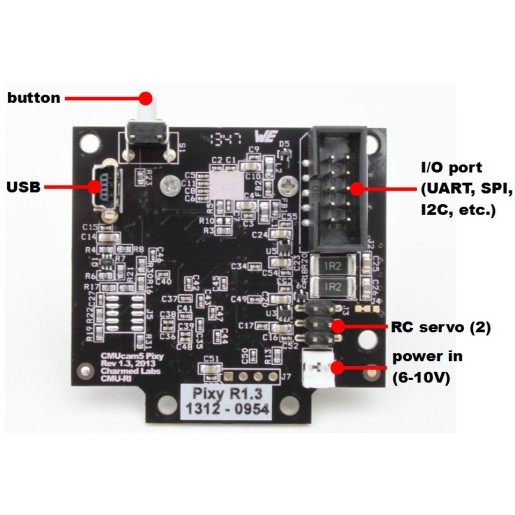
PixyMon is an application that runs on Windows, MacOs and Linux. It allows you to see what Pixy sees, either as raw or processed video. It also allows you to configure your Pixy, set the output port and manage color signatures. PixyMon communicates with Pixy over a standard mini USB cable. PixyMon is great for debugging your application.